📖
Three.js Cannon.es 調査資料 - Constraint確認/DistanceConstraint
この記事のスナップショット
DistanceConstraintの挙動
ソース
動かし方
- ソース一式を WEB サーバ上に配置してください
- マウス操作 .. カメラ位置の変更
概要
- DistanceConstraintの挙動を確認します。
CANNON の制約(constraint)
物理エンジン Cannon.es において古典力学のふるまい、とりわけ2つの物体の動きを制限するものとして下記があります。
| クラス名 | 説明・例 |
|---|---|
| Spring | バネ |
| DistanceConstraint | 中心同士を一定の長さで固定。 |
| PointToPointConstraint | 点結合。振り子。 |
| LockConstraint | 固定。 |
| HingeConstraint | 軸結合。扉のちょうつがい。回転モーター。 |
| ConeTwistConstraint | 軸結合+ひねり。ragdoll の関節。 |
残念ながら平行移動(slider)はサポートされてないようです。
今回は DistanceConstraint について取り上げます。
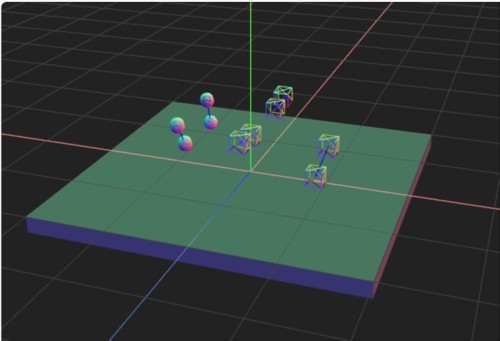
やったこと(1)
まず3つの状態を用意しました。
- 振り子を模して球を結合した場合 .. 左に配置
- 振り子を模して立方体を結合した場合 .. 中央に配置
- 振り子を模して立方体を結合して力を加えた場合 .. 右に配置
DistanceConstraint の使い方は、繋ぎたい 2つのオブジェクトと距離を指定し、world に追加するだけです。
下記では1番目(球の振り子)の例を示します。
const radius = 1;
const moObj1AShape = new CANNON.Sphere(radius);
const moObj1ABody = new CANNON.Body({mass: 0, shape: moObj1AShape, position: new CANNON.Vec3(-10, 5, 0)});
world.addBody(moObj1ABody)
const viObj1AGeo = new THREE.SphereGeometry(radius, 6, 6);
const viObj1AMtr = new THREE.MeshNormalMaterial({wireframe: true});
const viObj1AMesh = new THREE.Mesh(viObj1AGeo, viObj1AMtr);
viObj1AMesh.position.copy(moObj1ABody.position);
viObj1AMesh.quaternion.copy(moObj1ABody.quaternion);
scene.add(viObj1AMesh);
//
const moObj1BShape = new CANNON.Sphere(radius);
const moObj1BBody = new CANNON.Body({mass: 1, shape: moObj1BShape, position: new CANNON.Vec3(-10, 5, 3)});
world.addBody(moObj1BBody)
const viObj1BGeo = new THREE.SphereGeometry(radius, 6, 6);
const viObj1BMtr = new THREE.MeshNormalMaterial({wireframe: true});
const viObj1BMesh = new THREE.Mesh(viObj1BGeo, viObj1BMtr);
viObj1BMesh.position.copy(moObj1BBody.position);
viObj1BMesh.quaternion.copy(moObj1BBody.quaternion);
scene.add(viObj1BMesh);
// 一定距離(=4)でつなぐ
const moObj1Const = new CANNON.DistanceConstraint(moObj1ABody, moObj1BBody, 4);
world.addConstraint(moObj1Const);
// DistanceConstraintの可視化 二つのオブジェクトの中心をつないで線を引く
const viObj1Mtr = new THREE.LineBasicMaterial( { color: 0x0000ff } );
const viObj1Points = [];
viObj1Points.push( moObj1ABody.position );
viObj1Points.push( moObj1BBody.position );
const viObj1Geo = new THREE.BufferGeometry().setFromPoints(viObj1Points);
const viObj1Line = new THREE.Line(viObj1Geo, viObj1Mtr);
scene.add(viObj1Line);
DistanceConstraint は物体の中心を端点にしてつなぎます。その動きを注視して見ると少々違和感を感じます。矩形の振り子がわかりやすいですが、姿勢(向きを)変えずに振り子の動きをしています。
ちなみに真ん中の振り子が床をこすっているのはご愛敬。
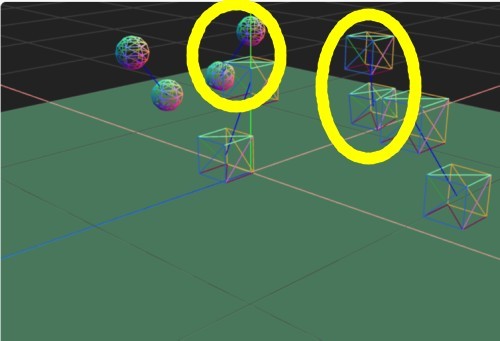
やったこと(2)
振り子の動きが気になってしまい、なんとか解消できないものかと考えた結果、振り子の球とアンカー(もう 1つの固定された球)を PointToPointConstraint でつなげば良さげです。
DistanceConstraint は距離だけでつなぐので、繋がれたオブジェクトの姿勢を制限しません。一方、PointToPointConstraint ではオブジェクトからの任意の位置で繋ぐので、繋がれた方向に向いて姿勢が固定されます。
球の場合と立方体の場合を追加、左奥と中央奥に配置しました。
振り子っぽくなってますね。すっきりしました。
すっきりした振り子
次は PointToPointConstraint を扱います。
Discussion