[AI Challenge 2025] Optunaで寝ている間もパラメータチューニング
はじめに
自動運転AIチャレンジ2025、開催してから約3週間ほど経ちましたね。私はようやく全体像を掴んできたような掴めてないようなという感じですが、どこを改善をすればさらによいスコアを出せるのか、頭を抱えております。
さて、地道な経路調整とパラメータチューニングで日々苦労されていらっしゃる方の参考になればと思い、私が寝ている間に回しているスクリプト群を紹介できればと思います。
実際には速度が10km/hを下回ったらコンテナを終了させるなどのさらなる効率化を行っているのですが、それはまた別記事に......
全体像
ざっくりと次のようなステップで、パラメータチューニングの完全自動化を実現しています。
ここで、設定は reference.launch.xml を、Docker ビルド・実行はそれぞれ docker_build.sh eval と docker_run.sh eval cpu を指しています。これらのbashはPythonスクリプト内でサブプロセスで立ち上げています。
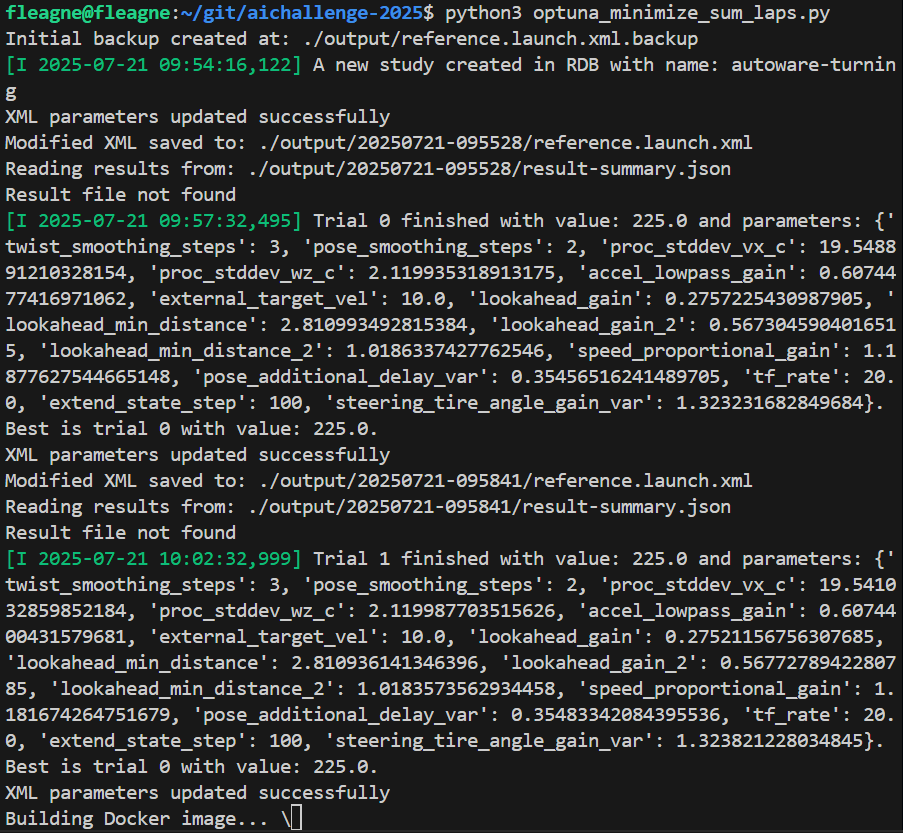
実行すると次のような形で、データベースを作り、バックアップを保存し、パラメータを自動で調整しながら延々と周回してくれます。助かりますね。
前提
公式ドキュメントの環境構築が終わっている前提としています。
終わっていない方は、まずこちらを終えて動作確認が取れるところまで進めてください。
事前準備
OptunaとOptuna Dashboardをインストールします。
pip3 install optuna optuna-dashboard
Optuna DashboardはOptunaで実行した結果を格納するDBを画面上で確認できるようにするものです。なくても良いですが、あった方が後から分析で助かります。

チャートで変化が分かります。私は225秒で打ち切ってしまっているので変化が小さいですが、余計なことしなければいい感じに変化がとれて楽しいです。
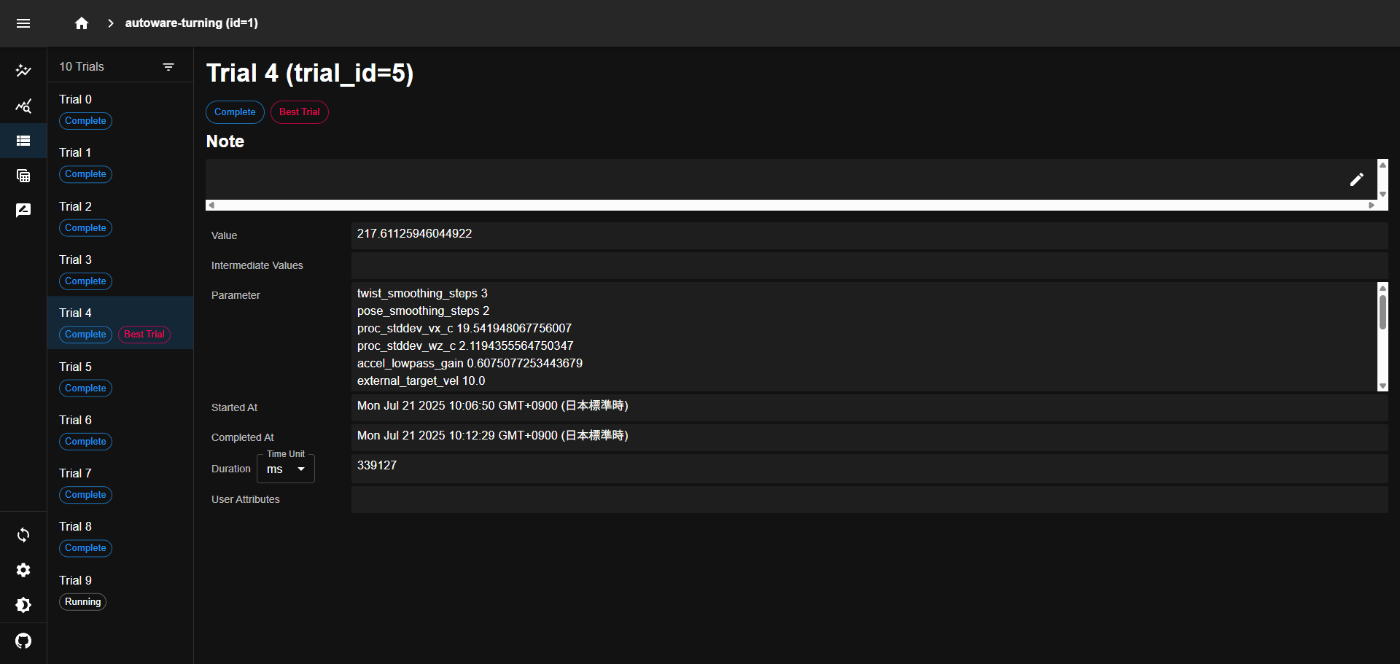
一番早い結果にはラベルが貼られるので、あとからどれがよかったのか追いやすい。
(オンライン採点環境だと、このスコアが何回投稿しても出ないのはなぁぜ......?)
設定バックアップ
今回のスクリプトは reference.launch.xml を直接上書きするため、まず初めにバックアップを取るようにしています。
# Create single backup at script start
launch_file_path = './aichallenge/workspace/src/aichallenge_submit/aichallenge_submit_launch/launch/reference.launch.xml'
output_dir = './output'
if not os.path.exists(output_dir):
os.makedirs(output_dir)
backup_path = backup_launch_file(launch_file_path, output_dir)
print(f"Initial backup created at: {backup_path}")
outputディレクトリは基本的にあると思うのですが、そこに退避させるようにしています。正直これはどこでもよいです。
Optuna Study作成
Optuna Studyを作成します。directionは最小化を目指すのか、最大化を目指すのかなどの方向性を決めるものですね。study_nameは研究名なので、何でも良いです。storageはOptunaの結果を保存する左記のデータベースです。load_if_exists=Trueにすると、DBがなければ作り、あればそれを使うようになります。
ここまで設定したら最適化を走らせます。objectiveはPythonスクリプトの関数名なので、分かりやすい関数名を自由につけてもらえればいいのかなと。n_trialsは何回試行するかですね。これもご自由に。ただし、今回のスクリプトはビルドプロセスと実行プロセス両方挟むので、一定速度を下回ったらコンテナを終了するなどしないと、1回あたり8~10分くらいかかるようになるんじゃないかなと思います。
study = optuna.create_study(direction='minimize', study_name='autoware-turning', storage='sqlite:///autoware-turning.db', load_if_exists=True)
study.optimize(objective, n_trials=100)
XMLパラメータ修正
object関数の中で、XMLパラメータを直接修正するようなスクリプトを書いています。
分かりやすく一部を切り出すと次のような感じですね。
# アップデートする対象のパラメータの型と範囲を指定
# 下記であればfloat形で、10.0~50.0の間で適当に値が設定される
external_target_vel = trial.suggest_float('external_target_vel', 10.0, 50.0)
# reference.launch.xmlのパスを指定
launch_file_path = './aichallenge/workspace/src/aichallenge_submit/aichallenge_submit_launch/launch/reference.launch.xml'
try:
# アップデートする対象のパラメータを指定
parameter_updates = {
'external_target_vel': external_target_vel,
}
modify_xml_parameter(launch_file_path, parameter_updates)
def modify_xml_parameter(xml_file_path, parameter_updates):
# XMLファイルをパース
tree = ET.parse(xml_file_path)
root = tree.getroot()
# 後工程で諸々楽するためにパラメータのマッピングを設定
param_mappings = {
'external_target_vel': ('node', 'simple_pure_pursuit', 'param',
}
# パラメータを更新していく
for param_name, value in parameter_updates.items():
if param_name in param_mappings:
# simple_pure_pursuitノードにあるパラメータを更新する
for node in root.findall('.//node[@pkg="simple_pure_pursuit"]'):
for param in node.findall('param'):
if param.get('name') == param_name:
param.set('value', str(value))
break
break
# ファイルに書き込む
tree.write(xml_file_path, encoding='utf-8', xml_declaration=True)
特に難しいことはしていません。直接更新するので、うまくいったファイルは後工程で記録しておき、復元を容易にできるようにしています。
Docker ビルド・実行
PythonからDockerのビルド・実行を行います。
# 2. Docker build
run_subprocess_with_spinner(['./create_submit_file.bash'], "Creating submit file...", capture_output=True, text=True, timeout=60)
build_result = run_subprocess_with_spinner(['./docker_build.sh', 'eval'],
"Building Docker image...",
capture_output=True, text=True, timeout=1800)
if build_result.returncode != 0:
print(f"Docker build failed: {build_result.stderr}")
return 225.0
# 3. Docker run (without environment variables)
run_result = run_subprocess_with_spinner(['./docker_run.sh', 'eval', 'cpu'],
"Running Docker container...",
capture_output=True, text=True, timeout=3600)
if run_result.returncode != 0:
print(f"Docker run failed: {run_result.stderr}")
return 225.0
def spinner_animation(message, stop_event):
"""Display a spinning animation while subprocess is running"""
spinner_chars = ['|', '/', '-', '\\']
idx = 0
while not stop_event.is_set():
sys.stdout.write(f'\r{message} {spinner_chars[idx]}')
sys.stdout.flush()
idx = (idx + 1) % len(spinner_chars)
time.sleep(0.1)
sys.stdout.write('\r' + ' ' * (len(message) + 2) + '\r')
sys.stdout.flush()
def run_subprocess_with_spinner(cmd, message, **kwargs):
"""Run subprocess with spinner animation"""
stop_event = threading.Event()
spinner_thread = threading.Thread(target=spinner_animation, args=(message, stop_event))
spinner_thread.start()
try:
result = subprocess.run(cmd, **kwargs)
return result
finally:
stop_event.set()
spinner_thread.join()
Pythonのサブプロセスで動かしているだけです。
いま動いているのか動いていないのかわからなくなるのが嫌だったので、スピナーアニメーションを追加していますが、こんな余計なことはしないでもよいです。
結果ファイル取得
ご存じの通り、実行結果はoutputディレクトリに保存されます。

ここから今実行した結果を取得し、ラップタイム計算に繋げます。
フォルダ名はyyyyMMdd-hhmmss形式なので、その形式で最新のものを取得するようにしています。実装自体はかなり雑で、このoutputディレクトリは定期的に削除しきれいにするようにしています。
ラップタイム計算
result-summary.jsonのデータを用いて、周回データを記録します。
この時、6周回しているかどうかを必ずチェックしてください。合計ラップの最小化なので、6周回していないものが混じるとそれが最小スコアとなってしまうので。
with open(result_file, 'r') as f:
result = json.load(f)
if 'laps' not in result or not result['laps']:
print("No laps data found")
return 225.0
# Calculate sum of lap times (must be exactly 6 laps)
lap_times = result['laps']
if len(lap_times) != 6:
print(f"Must complete exactly 6 laps, got {len(lap_times)} laps")
return 225.0
total_time = sum(lap_times)
print(f"Total lap time for 6 laps: {total_time}")
return total_time
愚直ですが、result-summary.jsonのlapsの長さを確認し、6でなければ弾くようにしています。
設定復元
最後に、バックアップとして保存しておいた reference.launch.xml を戻して終了です。別に戻さなくてなげっぱでもよい。
全ソースコード
「いいからコード見せろ」と思うので公開します。
とりあえず動かすことを優先しているので、改良の余地大いにあり、です。
経路によって変わってくるところもあると思うので、回してみながらパラメータの範囲を絞っていくことが大切です。
optuna_minimize_sum_laps.py
"""
Optunaを使用して、Autowareのターン走行における6周のラップタイムの合計を最小化するスクリプトです。
このスクリプトは、Dockerを使用してAutowareの評価を行い、最適なパラメータを探索します。
各試行では、Dockerイメージのビルド、コンテナの実行、および結果の解析を行います。
使い方:
$ python3 optuna_minimize_sum_laps.py
確認方法:
$ optuna-dashboard sqlite:///autoware-turning.db
"""
import optuna
import subprocess
import os
import json
import glob
import threading
import time
import sys
import xml.etree.ElementTree as ET
import shutil
def spinner_animation(message, stop_event):
"""Display a spinning animation while subprocess is running"""
spinner_chars = ['|', '/', '-', '\\']
idx = 0
while not stop_event.is_set():
sys.stdout.write(f'\r{message} {spinner_chars[idx]}')
sys.stdout.flush()
idx = (idx + 1) % len(spinner_chars)
time.sleep(0.1)
sys.stdout.write('\r' + ' ' * (len(message) + 2) + '\r')
sys.stdout.flush()
def run_subprocess_with_spinner(cmd, message, **kwargs):
"""Run subprocess with spinner animation"""
stop_event = threading.Event()
spinner_thread = threading.Thread(target=spinner_animation, args=(message, stop_event))
spinner_thread.start()
try:
result = subprocess.run(cmd, **kwargs)
return result
finally:
stop_event.set()
spinner_thread.join()
def backup_launch_file(launch_file_path, backup_dir):
"""Create a backup of the launch file"""
if not os.path.exists(backup_dir):
os.makedirs(backup_dir)
backup_path = os.path.join(backup_dir, 'reference.launch.xml.backup')
shutil.copy2(launch_file_path, backup_path)
return backup_path
def restore_launch_file(launch_file_path, backup_path):
"""Restore the launch file from backup"""
if os.path.exists(backup_path):
shutil.copy2(backup_path, launch_file_path)
return True
return False
def modify_xml_parameter(xml_file_path, parameter_updates):
"""Modify XML parameters directly
Args:
xml_file_path: Path to the XML file
parameter_updates: Dict of parameter updates in format {tag_name: {attribute: value}}
"""
# Parse the XML file
tree = ET.parse(xml_file_path)
root = tree.getroot()
# Define the parameter mapping with their XPath-like locations
param_mappings = {
'twist_smoothing_steps': ('include', 'ekf_localizer', 'arg', 'twist_smoothing_steps'),
'pose_smoothing_steps': ('include', 'ekf_localizer', 'arg', 'pose_smoothing_steps'),
'proc_stddev_vx_c': ('include', 'ekf_localizer', 'arg', 'proc_stddev_vx_c'),
'proc_stddev_wz_c': ('include', 'ekf_localizer', 'arg', 'proc_stddev_wz_c'),
'accel_lowpass_gain': ('node', 'twist2accel', 'param', 'accel_lowpass_gain'),
'external_target_vel': ('node', 'simple_pure_pursuit', 'param', 'external_target_vel'),
'lookahead_gain': ('node', 'simple_pure_pursuit', 'param', 'lookahead_gain'),
'lookahead_min_distance': ('node', 'simple_pure_pursuit', 'param', 'lookahead_min_distance'),
'speed_proportional_gain': ('node', 'simple_pure_pursuit', 'param', 'speed_proportional_gain'),
'pose_additional_delay_var': ('let', 'pose_additional_delay_var', 'value', 'pose_additional_delay_var'),
'tf_rate': ('include', 'ekf_localizer', 'arg', 'tf_rate'),
'extend_state_step': ('include', 'ekf_localizer', 'arg', 'extend_state_step'),
'steering_tire_angle_gain_var': ('let', 'steering_tire_angle_gain_var', 'value', 'steering_tire_angle_gain_var')
}
# Update each parameter
for param_name, value in parameter_updates.items():
if param_name in param_mappings:
# Find and update the parameter
if param_name in ['twist_smoothing_steps', 'pose_smoothing_steps', 'proc_stddev_vx_c', 'proc_stddev_wz_c', 'tf_rate', 'extend_state_step']:
# These are in ekf_localizer include
for include in root.findall('.//include[@file]'):
if 'ekf_localizer' in include.get('file', ''):
for arg in include.findall('arg'):
if arg.get('name') == param_name:
arg.set('value', str(value))
break
break
elif param_name == 'accel_lowpass_gain':
# This is in twist2accel node
for node in root.findall('.//node[@pkg="twist2accel"]'):
for param in node.findall('param'):
if param.get('name') == param_name:
param.set('value', str(value))
break
break
elif param_name in ['pose_additional_delay_var', 'steering_tire_angle_gain_var']:
# These are <let> tags
for let in root.findall('.//let[@name="{}"]'.format(param_name)):
let.set('value', str(value))
break
else:
# These are in simple_pure_pursuit node
for node in root.findall('.//node[@pkg="simple_pure_pursuit"]'):
for param in node.findall('param'):
if param.get('name') == param_name:
param.set('value', str(value))
break
break
# Write back to file
tree.write(xml_file_path, encoding='utf-8', xml_declaration=True)
def objective(trial):
twist_smoothing_steps = trial.suggest_int('twist_smoothing_steps', 1, 5)
pose_smoothing_steps = trial.suggest_int('pose_smoothing_steps', 1, 5)
proc_stddev_vx_c = trial.suggest_float('proc_stddev_vx_c', 15.0, 25.0)
proc_stddev_wz_c = trial.suggest_float('proc_stddev_wz_c', 0.5, 2.5)
accel_lowpass_gain = trial.suggest_float('accel_lowpass_gain', 0.1, 1.0)
external_target_vel = trial.suggest_float('external_target_vel', 5.0, 30.0)
lookahead_gain = trial.suggest_float('lookahead_gain', 0.1, 1.0)
lookahead_min_distance = trial.suggest_float('lookahead_min_distance', 1.0, 5.0)
speed_proportional_gain = trial.suggest_float('speed_proportional_gain', 0.5, 3.0)
pose_additional_delay_var = trial.suggest_float('pose_additional_delay_var', 0.1, 1.0)
tf_rate = trial.suggest_float('tf_rate', 10.0, 50.0)
extend_state_step = trial.suggest_int('extend_state_step', 50, 200)
steering_tire_angle_gain_var = trial.suggest_float('steering_tire_angle_gain_var', 1.0, 1.7)
# Define paths
launch_file_path = './aichallenge/workspace/src/aichallenge_submit/aichallenge_submit_launch/launch/reference.launch.xml'
try:
# 1. Modify XML parameters directly
parameter_updates = {
'twist_smoothing_steps': twist_smoothing_steps,
'pose_smoothing_steps': pose_smoothing_steps,
'proc_stddev_vx_c': proc_stddev_vx_c,
'proc_stddev_wz_c': proc_stddev_wz_c,
'accel_lowpass_gain': accel_lowpass_gain,
'external_target_vel': external_target_vel,
'lookahead_gain': lookahead_gain,
'lookahead_min_distance': lookahead_min_distance,
'speed_proportional_gain': speed_proportional_gain,
'pose_additional_delay_var': pose_additional_delay_var,
'tf_rate': tf_rate,
'extend_state_step': extend_state_step,
'steering_tire_angle_gain_var': steering_tire_angle_gain_var
}
modify_xml_parameter(launch_file_path, parameter_updates)
print("XML parameters updated successfully")
# 2. Docker build
run_subprocess_with_spinner(['./create_submit_file.bash'], "Creating submit file...", capture_output=True, text=True, timeout=60)
build_result = run_subprocess_with_spinner(['./docker_build.sh', 'eval'],
"Building Docker image...",
capture_output=True, text=True, timeout=1800)
if build_result.returncode != 0:
print(f"Docker build failed: {build_result.stderr}")
return 225.0
# 3. Docker run (without environment variables)
run_result = run_subprocess_with_spinner(['./docker_run.sh', 'eval', 'cpu'],
"Running Docker container...",
capture_output=True, text=True, timeout=3600)
if run_result.returncode != 0:
print(f"Docker run failed: {run_result.stderr}")
return 225.0
# 4. Find latest result folder
output_dir = './output'
if not os.path.exists(output_dir):
print("Output directory not found")
return 225.0
# Get all timestamped folders
result_folders = glob.glob(os.path.join(output_dir, '[0-9][0-9][0-9][0-9][0-9][0-9][0-9][0-9]-[0-9][0-9][0-9][0-9][0-9][0-9]'))
if not result_folders:
print("No result folders found")
return 225.0
# Find latest folder
latest_folder = max(result_folders, key=os.path.getctime)
result_file = os.path.join(latest_folder, 'result-summary.json')
# 5. Save modified XML file to result folder
result_xml_path = os.path.join(latest_folder, 'reference.launch.xml')
shutil.copy2(launch_file_path, result_xml_path)
print(f"Modified XML saved to: {result_xml_path}")
print(f"Reading results from: {result_file}")
# 6. Read and calculate score
if not os.path.exists(result_file):
print("Result file not found")
return 225.0
with open(result_file, 'r') as f:
result = json.load(f)
print(f"Result data: {result}")
if 'laps' not in result or not result['laps']:
print("No laps data found")
return 225.0
# Calculate sum of lap times (must be exactly 6 laps)
lap_times = result['laps']
if len(lap_times) != 6:
print(f"Must complete exactly 6 laps, got {len(lap_times)} laps")
return 225.0
total_time = sum(lap_times)
print(f"Total lap time for 6 laps: {total_time}")
print("=" * 50)
return total_time
except subprocess.TimeoutExpired:
print("Process timed out")
return 225.0
except Exception as e:
print(f"Error during evaluation: {e}")
return 225.0
finally:
# Skip per-trial restoration - will be handled at script end
pass
def main():
# Create single backup at script start
launch_file_path = './aichallenge/workspace/src/aichallenge_submit/aichallenge_submit_launch/launch/reference.launch.xml'
output_dir = './output'
if not os.path.exists(output_dir):
os.makedirs(output_dir)
backup_path = backup_launch_file(launch_file_path, output_dir)
print(f"Initial backup created at: {backup_path}")
try:
study = optuna.create_study(direction='minimize', study_name='autoware-turning', storage='sqlite:///autoware-turning.db', load_if_exists=True)
study.optimize(objective, n_trials=100)
print("=" * 50)
print('Study finished')
print('Number of trials:', len(study.trials))
print('Best trial:')
print(' Best parameters:', study.best_params)
print(' Best score :', study.best_value)
print("=" * 50)
except KeyboardInterrupt:
print("\nOptimization interrupted by user")
except Exception as e:
print(f"Error during optimization: {e}")
finally:
# Restore backup file at script end
if os.path.exists(backup_path):
if restore_launch_file(launch_file_path, backup_path):
print(f"Launch file restored from backup: {backup_path}")
# Clean up backup file
os.remove(backup_path)
print("Backup file cleaned up")
else:
print("Failed to restore launch file from backup")
print("=" * 50)
if __name__ == '__main__':
main()
注意事項
WSLのボリュームサイズ増
Dockerを作りまくるので、 Images や Build Cache がたまり、Ubuntuのボリュームサイズが爆増します。(私は1TB潰しました)
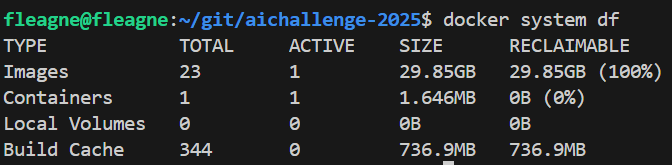
あまりに膨れ上がると、WSLに接続できなくなりますので、定期的にWSLのボリュームを最適化する必要があります。
下記の記事に簡単ですが対策を書いているので、ご参照ください。
おわりに
地道なパラメータ調整つらいと思うので、なるべく効率化し本質的な作業に集中できるようにしましょう!
参考記事
下記の記事を参考にさせていただきました。先駆者の皆様に心からお礼申し上げます。
Discussion