🔥
ROS2 JazzyでのGazeboシミュレーションの垣根を払う!
概要
- いま、ROS2 Jazzy (Ubuntu 24.04) でシミュレータ事情に関する情報はやや見つけづらくなっています。名前の変更の歴史のせいで検索が死んでいる状態です。
- 「結局なにをどうすればいいんだーー!!」と思ってググったりChatGPTに聞いたりすると、それなりに沼にハマります。
- 結論から言えば新GazeboとそのROS連携のros_gz_simを使うとよいのですが、この記事ではその本質情報についてまとめます。
- ROS2でのxacroの使い方の記事としても役に立てると思います。
忙しい人のためのまとめ
- ROS2 Jazzyでのシミュレーションはros_gz_simを使うべきで、そのサンプルはこれです。
- 現在の公式ドキュメントはこれ。(Migrating Gazebo Classic ROS2 PackagesのBefore AfterのAfterが本質情報っぽくて見やすいです)
- そしてここにはURDFから(/robot_descriptionから)ロボットをspawnする例がないので書いておくと、以下のrosrunをlaunchなりなんなりですればOKです。
$ ros2 run ros_gz_sim create -name <モデル名> -topic /robot_description
理解を助けるためのGazeboの歴史と、残念なこと
- (開発管理者は変遷がありますが) 当初のシミュレータは長らく "Gazebo" として開発されてきました。ROS1時代に広く使われていたのはこれです。
- 2019年から、Open Robotics (旧OSRF) がアーキテクチャを刷新した "Ignition" として別プロジェクトとしての提供を開始。この時点でGazebo(古い)とIgnition(新しい)がありました。
- 2022年、商標の問題からIgnitionの名前が使えなくなり、"Gazebo"に名前を戻しました。(←元凶!)
- 区別のため、
- 古いかつてのGazeboを "Gazebo Classic"
- 新しいもの(元Ignition)を "Gazebo"
- と呼び分けるようになりました。
残念なこと
- 名前の呼び分け自体は上記の通り一応うまく行っているのですが、問題は「インターネット上にある過去の記事を書き換えることはできない」ことです。
- いま"Gazebo"(新しい方を意図)して検索しても、古い方の記事が出てきてしまいます。
- ツールやパッケージとして、ROS1 x Gazebo Classic、ROS2 x Gazebo Classic、ROS2 x Ignition、ROS2 x Gazebo(改名後)の4種類があり、やや混迷を極めている状況。
- ChatGPTなども、なかなかまともな返答を返してくれません。辛い。
結局、いま使うものはどれ?
- 検索するときは以下のキーワードを念頭に検索するのがオススメです。
- OSSとして公開されているロボットのROS2パッケージ群を参考にする際にも。
- ただ、まだ最新のものについての記事はあまり多くない印象です。
対応するROSパッケージ
- 現在ROS Jazzyで使うもの
- ros_gz シリーズ (ros_gz_sim, ros_gz_bridge, ...)
- gz_ros2_control
- 使わないもの
- ros_gazebo
- gazebo_ros2_control
対応するシミュレータ
- FYI: gazeboは本来ROS非依存で使えるツールで、上記ROSパッケージはそのROSとの連携を担っているものです。下記はシミュレータ本体のことを指しています。
- 現在ROS Jazzyで使うもの
- 使わないもの
- ign (改名前のIgnition)
- gazebo (Gazebo Classic)
ROS2 JazzyでGazeboによる対向2輪のシミュレーション
- 基本は以下のテンプレートを真似すればいいと思いますが、ロボットのspawnをSDFからやる例なので、ここではURDFから (/robot_descriptionから) やる例を示します。
- diff drive controllerで/cmd_velから動かせるまでをゴールとします。
- 私の個人的なHCRというロボットを例に書きます。名前は適宜。
- インストール類はどうせ何かしら変わるので、足りないと思ったパッケージをインストールしてください。
パッケージ (自由ですが、例として)
- hcr_description
- sim/real問わず、自分のロボットのURDFの記述
- ros2_control用のjointのインターフェース設定 (ROS1でいうURDF内のtransmissionの設定)
- hcr_gazebo_bringup
- sim用のURDFの記述
- gazeboのros2_controlに任せる
- hcr_diff_drive_controller
- sim/real問わず、diff drive controller(差動2輪の速度制御・エンコーダベースのodometry)の立ち上げ
FYI 前提知識 (読み飛ばしてどうぞ)
- ros2_controlでの制御系は主に三者からなり、
- controller_manager (コントローラの管理)
- ハードウェアインターフェース (メタな制御器の出力を実ハードに繋ぐ部分)
- spawner (外部からコントローラを追加する)
- 前の2つはシミュレーション時はGazebo(ros_gz_sim)に任せ、実機のときは自分で書くことになります。
hcr_description (自分のロボットの定義)
-
これはこの記事で解説する本質部分ではないので、ご参考までに。
-
xacroの使い方がわからない人は参考になるかも
-
基本的なURDFの書き方は難しいことはないと思うので、公式ドキュメント を参照したりしてください。
-
sim/real問わず、このロボットを扱う上で必要な部分を立ち上げるlaunchはこんな感じです。
-
個人的な(ROS1と比べての)詰まりポイントはxacroの使い方でした。substitutionとしてxacroの実行結果(URDF)を得て、遅延評価でrobot_state_publisherに渡すみたいですね。なかなか初心者向きではないなという感想です。
-
start_meta_robot.launch.py
from launch_ros.actions import Node, SetParametersFromFile
from launch_ros.substitutions import FindPackageShare
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import (
Command,
FindExecutable,
LaunchConfiguration,
PathJoinSubstitution,
)
def generate_launch_description() -> LaunchDescription:
hcr_description_share_path = FindPackageShare("hcr_description")
model_file_default = PathJoinSubstitution(
[hcr_description_share_path, "urdf", "hcr.urdf.xacro"]
)
# launch arguments
model_arg = DeclareLaunchArgument("model", default_value=model_file_default)
sim_arg = DeclareLaunchArgument("sim", default_value="false")
# substitutions
model = LaunchConfiguration("model")
sim = LaunchConfiguration("sim")
# xacro to urdf
robot_description = Command(
[
PathJoinSubstitution([FindExecutable(name="xacro")]),
" ",
model,
]
)
# load rosparams for hardware settings
set_hardware_parameters = SetParametersFromFile(
filename=PathJoinSubstitution(
[FindPackageShare("hcr_description"), "config", "robot_hardware.yaml"]
)
)
# add joint_state_publisher and robot_state_publisher
joint_state_publisher_node = Node(
package="joint_state_publisher",
executable="joint_state_publisher",
output="screen",
parameters=[{"use_sim_time": sim}],
)
robot_state_publisher_node = Node(
package="robot_state_publisher",
executable="robot_state_publisher",
output="screen",
parameters=[{"robot_description": robot_description}],
)
return LaunchDescription(
[
model_arg,
sim_arg,
set_hardware_parameters,
joint_state_publisher_node,
robot_state_publisher_node,
]
)
- これをincludeして、かつrvizを立てるlaunchです。(必須ではありません)
show_robot.launch.py
import os
from launch import LaunchDescription
from launch.substitutions import LaunchConfiguration, PathJoinSubstitution
from launch.actions import IncludeLaunchDescription, DeclareLaunchArgument
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
def generate_launch_description() -> LaunchDescription:
hcr_description_share_path = FindPackageShare("hcr_description")
# set default value
model_file_default = PathJoinSubstitution(
[hcr_description_share_path, "urdf", "hcr.urdf.xacro"]
)
rviz_config_default = PathJoinSubstitution(
[hcr_description_share_path, "config", "urdf.rviz"]
)
# launch arguments
model_arg = DeclareLaunchArgument("model", default_value=model_file_default)
rviz_config_arg = DeclareLaunchArgument(
"rviz_config", default_value=rviz_config_default
)
use_sim_arg = DeclareLaunchArgument("use_sim", default_value="false")
# substitutions
model = LaunchConfiguration("model")
rviz_config = LaunchConfiguration("rviz_config")
use_sim = LaunchConfiguration("use_sim")
# include start_meta_robot.launch.py
start_meta_robot_launch = IncludeLaunchDescription(
launch_description_source=PathJoinSubstitution(
[hcr_description_share_path, "launch", "start_meta_robot.launch.py"]
),
launch_arguments={"model": model, "sim": use_sim}.items(),
)
# start rviz2
rviz2_node = Node(
package="rviz2",
arguments=["-d", rviz_config],
executable="rviz2",
)
return LaunchDescription(
[model_arg, rviz_config_arg, use_sim_arg, start_meta_robot_launch, rviz2_node]
)
-
robot_hardware.yaml(ROS1ではtransmissionとしてURDFに書いていた内容)
ros2_control:
ros__parameters:
update_rate: 50
joints:
- name: left_wheel_joint
command_interfaces:
- velocity
state_interfaces:
- velocity
- position
- name: right_wheel_joint
command_interfaces:
- velocity
state_interfaces:
- velocity
- position
hcr_gazebo_bringup (Gazeboの立ち上げ)
- hcr_gazebo_bringupのファイルツリーはこんな感じです
.
├── config
│ ├── gz_ros2_control.yaml
│ ├── ros_gz_bridge.yaml
│ └── sim.rviz
├── hcr_gazebo_bringup
│ └── __init__.py
├── launch
│ └── simple_sim.launch.py
├── package.xml
├── resource
│ └── hcr_gazebo_bringup
├── setup.cfg
├── setup.py
├── urdf
│ └── hcr_gazebo.urdf.xacro
└── worlds
└── empty.world
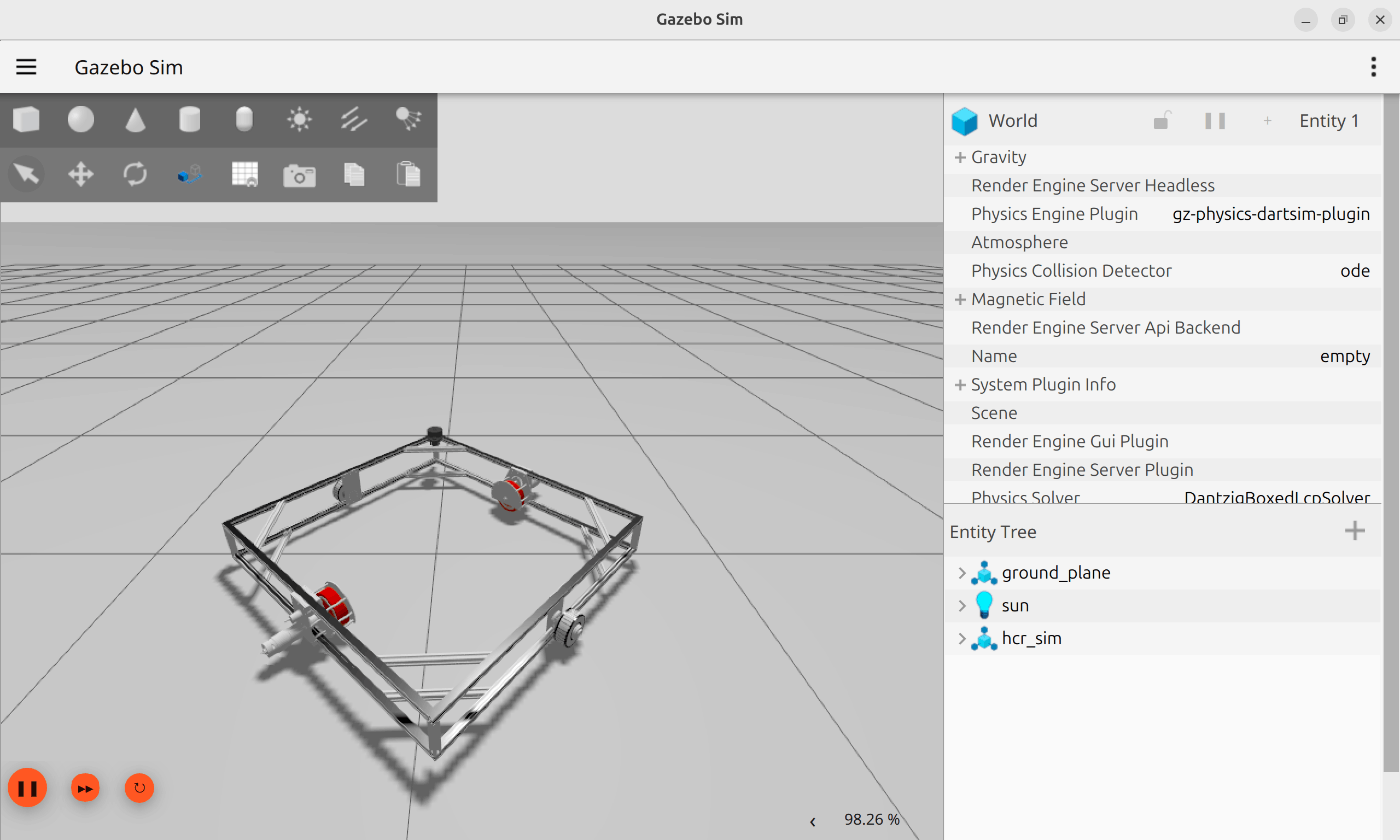
- まず、全体を俯瞰すべく、gazeboのシミュレーションを立ち上げるlaunchファイルから。
- やっていることは以下です。
- hcr_descriptionにある、joint state publisherとrobot state publisher、rvizの立ち上げのlaunchの呼び出し
- WaylandではOpenGLのエラーが出るので、X11を使うworkaround
- gazeboのリソース(SDFやSTLなどの)のパスの設定
- ros_gz_simの立ち上げ (Gazeboシミュレータ自体の立ち上げ)
- ros_gz_bridgeの立ち上げ (GazeboとROS2のブリッジ)
- /robot_descriptionから、シミュレーション世界にロボットをspawnさせる
- diff_drive_controllerの立ち上げ (後述)
simple_sim.launch.py
import os
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
from launch import LaunchDescription
from launch.actions import (
DeclareLaunchArgument,
IncludeLaunchDescription,
SetEnvironmentVariable,
)
from launch.substitutions import LaunchConfiguration, PathJoinSubstitution
def generate_launch_description() -> LaunchDescription:
hcr_gazebo_bringup_share_path = FindPackageShare("hcr_gazebo_bringup")
hcr_description_share_path = FindPackageShare("hcr_description")
# set default value
model_file_default = PathJoinSubstitution(
[hcr_gazebo_bringup_share_path, "urdf", "hcr_gazebo.urdf.xacro"]
)
rviz_config_default = PathJoinSubstitution(
[hcr_gazebo_bringup_share_path, "config", "sim.rviz"]
)
# launch arguments
model_arg = DeclareLaunchArgument("model", default_value=model_file_default)
model_name_arg = DeclareLaunchArgument("model_name", default_value="hcr_sim")
world_arg = DeclareLaunchArgument("world", default_value="empty.world")
rviz_config_arg = DeclareLaunchArgument(
"rviz_config", default_value=rviz_config_default
)
# substitutions
model = LaunchConfiguration("model")
model_name = LaunchConfiguration("model_name")
world = LaunchConfiguration("world")
robot_pos = LaunchConfiguration("robot_pos")
rviz_config = LaunchConfiguration("rviz_config")
# show robot (rviz)
show_robot_launch = IncludeLaunchDescription(
launch_description_source=PathJoinSubstitution(
[hcr_description_share_path, "launch", "show_robot.launch.py"]
),
launch_arguments={
"model": model,
"rviz_config": rviz_config,
"sim": "true",
}.items(),
)
# use x11 to avoid opengl error on ogre
# (WaylandだとOpenGLのエラーが出てしまったので、Xwaylandでごまかします)
set_qt_qpa_platform_env = SetEnvironmentVariable("QT_QPA_PLATFORM", "xcb")
# set gazebo resource path
# gazeboのmodel(SDF)のリソースのパスを通します。
# URDFの中で参照しているSTLファイルなどにもパスを通す必要があるので、
# hcr_description/..にパスを通します
# (URDF内でmodel://hcr_description/meshes/...とアクセスしているため)
hcr_description_path = FindPackageShare("hcr_description")
gz_sim_resource_path_candidates = [
PathJoinSubstitution([hcr_gazebo_bringup_share_path, "models"]),
":",
PathJoinSubstitution([hcr_description_path, os.pardir]),
]
set_gz_sim_resource_path_env = SetEnvironmentVariable(
"GZ_SIM_RESOURCE_PATH",
gz_sim_resource_path_candidates,
)
# start gazebo
gazebo_share_path = FindPackageShare("ros_gz_sim")
# -r: 起動したらシミュレータ世界の時計を動かし始める
# 第1引数: worldへのパス
gazebo_launch = IncludeLaunchDescription(
launch_description_source=PathJoinSubstitution(
[gazebo_share_path, "launch", "gz_sim.launch.py"]
),
launch_arguments={
"gz_args": [
"-r ",
PathJoinSubstitution([hcr_gazebo_bringup_share_path, "worlds", world]),
]
}.items(),
)
ros_gz_bridge_node = Node(
package="ros_gz_bridge",
executable="parameter_bridge",
parameters=[
{
"config_file": PathJoinSubstitution(
[
hcr_gazebo_bringup_share_path,
"config",
"ros_gz_bridge.yaml",
]
),
}
],
output="screen",
)
gazebo_model_spawner_node = Node(
package="ros_gz_sim",
executable="create",
name="gazebo_robot_model_spawner",
output="screen",
arguments=[
"-name",
model_name,
"-topic",
"/robot_description",
],
)
# start diff drive controller
diff_drive_controller_launch = IncludeLaunchDescription(
launch_description_source=PathJoinSubstitution(
[
FindPackageShare("hcr_diff_drive_controller"),
"launch",
"start.launch.py",
]
),
launch_arguments={
"use_sim": "true",
}.items(),
)
return LaunchDescription(
[
model_arg,
model_name_arg,
world_arg,
rviz_config_arg,
show_robot_launch,
set_qt_qpa_platform_env,
set_gz_sim_resource_path_env,
gazebo_launch,
ros_gz_bridge_node,
gazebo_model_spawner_node,
diff_drive_controller_launch,
]
)
- ros_gz_bridgeのパラメータ
- (Gazebo内はprotobufでシリアライズしたROSみたいな通信を使っていて、それとROSをブリッジします)
- 今回はgazeboのシミュレータ内の時刻/clockをROSにブリッジします。
ros_gz_bridge.yaml
---
- ros_topic_name: "/clock"
gz_topic_name: "/clock"
ros_type_name: "rosgraph_msgs/msg/Clock"
gz_type_name: "gz.msgs.Clock"
direction: GZ_TO_ROS
- Gazeboシミュレーション用のロボットモデルのURDF
- ロボットの定義自体はhcr_descriptionにあるURDFをincludeして、Gazebo用のros2_controlの設定とそれに必要なGazeboのプラグインを記述します。
hcr_gazebo.urdf.xacro
<?xml version="1.0"?>
<robot name="hcr_sim" xmlns:xacro="http://ros.org/wiki/xacro">
<xacro:include filename="$(find hcr_description)/urdf/hcr.urdf.xacro" />
<!-- wheel -->
<xacro:macro name="wheel_gazebo" params="position">
<gazebo reference="${position}_wheel_link">
<material>Gazebo/Red</material>
<mu1 value="2.5" />
<mu2 value="2.5" />
</gazebo>
</xacro:macro>
<xacro:wheel_gazebo position="left" />
<xacro:wheel_gazebo position="right" />
<!-- caster -->
<xacro:macro name="caster_gazebo" params="position">
<gazebo reference="${position}_caster_link">
<material>Gazebo/Black</material>
<mu1 value="0.0" />
<mu2 value="0.0" />
</gazebo>
</xacro:macro>
<xacro:caster_gazebo position="left" />
<xacro:caster_gazebo position="right" />
<!-- ros control -->
<ros2_control name="GazeboSimSystem" type="system">
<hardware>
<plugin>gz_ros2_control/GazeboSimSystem</plugin>
</hardware>
<joint name="left_wheel_joint">
<command_interface name="velocity">velocity</command_interface>
<state_interface name="position">position</state_interface>
<state_interface name="velocity">velocity</state_interface>
</joint>
<joint name="right_wheel_joint">
<command_interface name="velocity">velocity</command_interface>
<state_interface name="position">position</state_interface>
<state_interface name="velocity">velocity</state_interface>
</joint>
</ros2_control>
<gazebo>
<plugin filename="gz_ros2_control-system" name="gz_ros2_control::GazeboSimROS2ControlPlugin">
<parameters>$(find hcr_gazebo_bringup)/config/gz_ros2_control.yaml</parameters>
</plugin>
</gazebo>
</robot>
- ros_gzで動かしてくれているcontroller managerのパラメータを設定します。(読み込みはURDFでやっている)
gz_ros2_control.yaml
controller_manager:
ros__parameters:
update_rate: 100 # Hz
joint_state_broadcaster:
type: joint_state_broadcaster/JointStateBroadcaster
- 自前でやる必要はないけど、拡張できるようにworldファイルも一応。
empty.world
<?xml version="1.0" ?>
<sdf version="1.6">
<world name="empty">
<physics name="1ms" type="ignored">
<max_step_size>0.001</max_step_size>
<real_time_factor>1.0</real_time_factor>
</physics>
<plugin
filename="gz-sim-physics-system"
name="gz::sim::systems::Physics">
</plugin>
<plugin
filename="gz-sim-user-commands-system"
name="gz::sim::systems::UserCommands">
</plugin>
<plugin
filename="gz-sim-scene-broadcaster-system"
name="gz::sim::systems::SceneBroadcaster">
</plugin>
<plugin
filename="gz-sim-contact-system"
name="gz::sim::systems::Contact">
</plugin>
<plugin
filename="gz-sim-imu-system"
name="gz::sim::systems::Imu">
</plugin>
<light type="directional" name="sun">
<cast_shadows>true</cast_shadows>
<pose>0 0 10 0 0 0</pose>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.2 0.2 0.2 1</specular>
<attenuation>
<range>1000</range>
<constant>0.9</constant>
<linear>0.01</linear>
<quadratic>0.001</quadratic>
</attenuation>
<direction>-0.5 0.1 -0.9</direction>
</light>
<model name="ground_plane">
<static>true</static>
<link name="link">
<collision name="collision">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
</collision>
<visual name="visual">
<geometry>
<plane>
<normal>0 0 1</normal>
<size>100 100</size>
</plane>
</geometry>
<material>
<ambient>0.8 0.8 0.8 1</ambient>
<diffuse>0.8 0.8 0.8 1</diffuse>
<specular>0.8 0.8 0.8 1</specular>
</material>
</visual>
</link>
</model>
</world>
</sdf>
hcr_diff_drive_controller (diff_drive_controllerの立ち上げ)
- sim/real両用にしたいので、パッケージとして作って、bringupからlaunchするように構成しています。
- まずlaunchファイル。
- 個人的にまだROS2のrosparamよくわかっていないんですが、controllerのspawnerの引数としてパラメータを渡すと、起動順に依存せずにちゃんと動きました。
- おそらくこうでなくても動かせるはず
start.launch.py
from launch_ros.actions import Node
from launch_ros.substitutions import FindPackageShare
from launch import LaunchDescription
from launch.actions import DeclareLaunchArgument
from launch.substitutions import (
IfElseSubstitution,
LaunchConfiguration,
PathJoinSubstitution,
)
def generate_launch_description() -> LaunchDescription:
hcr_diff_drive_controller_share_path = FindPackageShare("hcr_diff_drive_controller")
# launch arguments
use_sim_arg = DeclareLaunchArgument("use_sim", default_value="false")
# substitutions
use_sim = LaunchConfiguration("use_sim")
# determine param file for diff drive controller
diff_drive_controller_param_file = IfElseSubstitution(
use_sim,
PathJoinSubstitution(
[hcr_diff_drive_controller_share_path, "config", "gazebo.yaml"]
),
PathJoinSubstitution(
[hcr_diff_drive_controller_share_path, "config", "real.yaml"]
),
)
# spawn diff drive controller
controller_spawner_node = Node(
package="controller_manager",
executable="spawner",
name="controller_spawner",
output="screen",
arguments=[
"diff_drive_controller",
"--param-file",
diff_drive_controller_param_file,
],
parameters=[diff_drive_controller_param_file],
)
return LaunchDescription(
[
use_sim_arg,
controller_spawner_node,
]
)
- diff_drive_controllerの設定
-
gazebo.yaml(real.yamlもパラメータが違うのみ)
diff_drive_controller:
ros__parameters:
type: "diff_drive_controller/DiffDriveController"
left_wheel_names: ["left_wheel_joint"]
right_wheel_names: ["right_wheel_joint"]
wheel_separation: 0.8082
wheel_radius: 0.0625
wheel_separation_multiplier: 1.0
left_wheel_radius_multiplier: 1.0
right_wheel_radius_multiplier: 1.0
odom_frame_id: odom
base_frame_id: base_link
pose_covariance_diagonal: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
twist_covariance_diagonal: [0.0, 0.0, 0.0, 0.0, 0.0, 0.0]
position_feedback: true
open_loop: true
enable_odom_tf: true
cmd_vel_timeout: 0.5 # seconds
publish_limited_velocity: true
velocity_rolling_window_size: 10
linear:
x:
has_velocity_limits: true
max_velocity: 0.85
min_velocity: -0.85
angular:
z:
has_velocity_limits: true
max_velocity: 1.5
min_velocity: -1.5
最後に
- このLLMの時代、たとえ時系列的に被っていなくとも、同じ名前をつけてはならないという教訓を得ました。難しい。(Gazeboとても便利なので、ありがたく使わせて頂いています…!感謝)
- pythonでのlaunchもなかなかとっつきづらいですね。苦しいCDKって感じがしましたが、使っているうちになるほどという感触を得ました。遅延評価って分かりづらいよね
その他、最近ROS2を触った人の役に立ちそうなこと
- ROS1でyocs_cmd_vel_muxをつかっていたけど、ROS2では公式から twist_mux として出ているんですね。いい話
Discussion