🌉
ROS2でrosbridge_suiteを使ってみた

rosbridge_suite はROSのTopicとWebSocketの仲介をしてくれるパッケージです.ROS2にも対応していますが,ROS2向けの情報がなかったので残しておきます.
まずは,パッケージを検索してインストールできるか確認します.
sudo apt update
apt search rosbridge_suite
検索に引っ掛かれば,ros-<rosdistro>-rosbridge-suite というパッケージが見つかります.環境に合わせてパッケージをインストールします.
sudo apt install -y ros-<rosdistro>-rosbridge-suite
インストールできたら,bridgeを起動します.ROS1のものとは微妙にlaunch file名が違います.
ros2 launch rosbridge_server rosbridge_websocket_launch.xml
Bridgeが起動しただけでは,面白くないのでGUIをインストールします.今回はrosboardというWebtoolを使います.次のコマンドでrosboardのインストールと起動を行います.
sudo pip3 install tornado simplejpeg
cd <ros2_ws>/src
git clone https://github.com/dheera/rosboard
cd <ros2_ws>
. install/setup.bash
cd <ros2_ws>/src/rosboard
./run
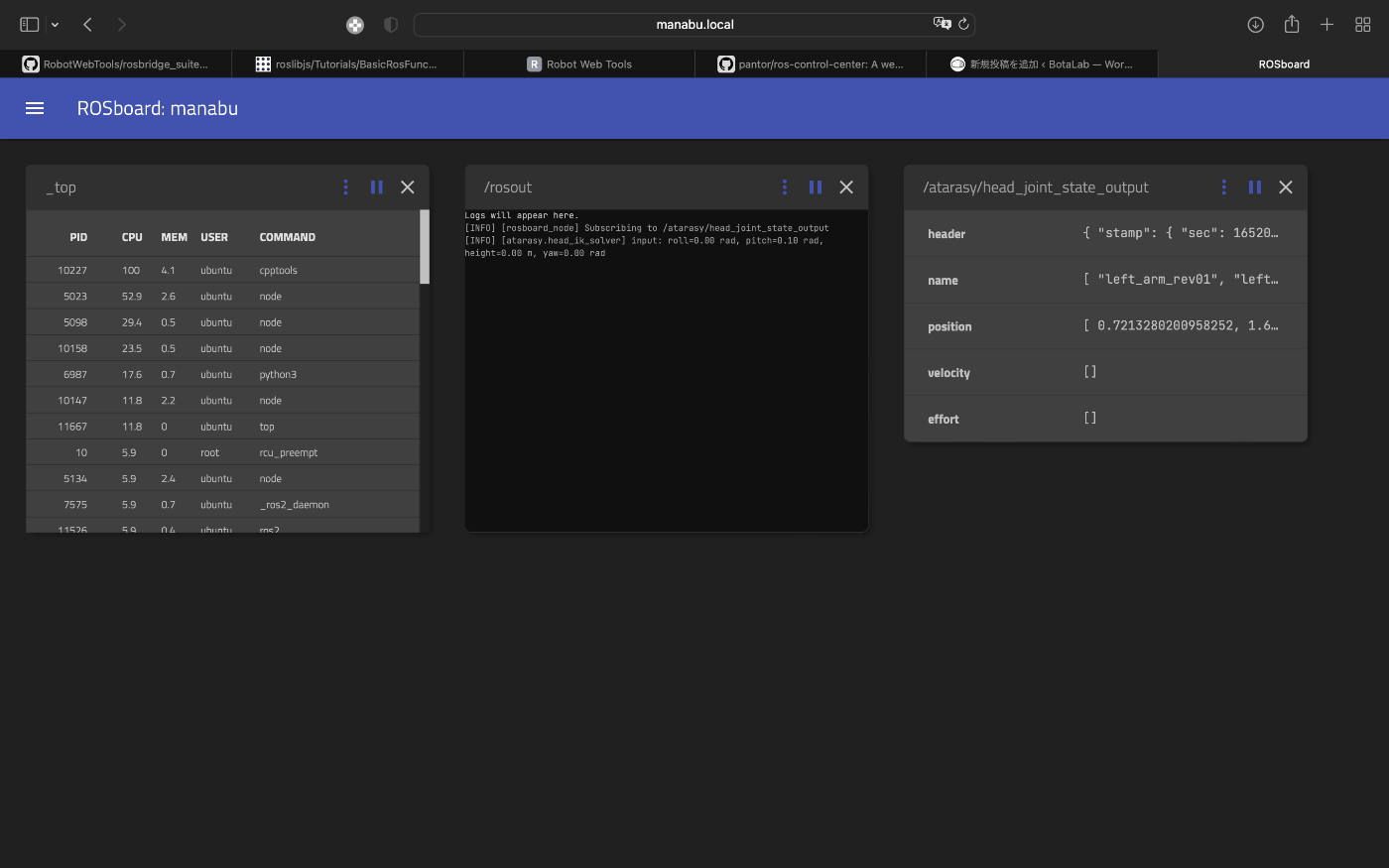
rosboard を立ち上げたら,http://<your robot ip address>:8888にアクセスするとROS Topicなどのモニタリングができるページが表示されます.
Discussion