🪐
【連載④】宇宙を目指す小さなIMU試作の記録:MPU6050+TMP102を統合してIMUモジュールにする
はじめに
これまでの記事では、MPU6050による加速度・ジャイロデータの取得、TMP102による温度データの取得をそれぞれ個別に行ってきました。
この回では、いよいよ両センサーをI²Cバス上に同時に接続し、Arduinoを使って同時に読み取る統合モジュールを構築します。
2つのセンサーはどちらもI²C対応であり、異なるI²Cアドレス(MPU6050: 0x68 / TMP102: 0x48)を持つため、1本のSDA/SCLラインで並列接続が可能です。これにより、Arduinoの1つのI²Cポートで複数センサーを制御する基本的な仕組みを学ぶことができます。
この回で行うこと
- MPU6050とTMP102を同じI²Cラインに接続
- Arduinoで両方のデータを同時に取得
- それらの値をCSV形式でシリアルモニターに出力
- Pythonなどでの後処理(グラフ化、補正)に備える
なぜCSV形式で出力するのか?
センサーの出力をシリアルモニターで“見るだけ”では、データの変化傾向や相関を分析するのが難しいです。
CSV(カンマ区切りテキスト)形式で出力すれば、ExcelやPythonのpandasなどでそのまま読み込み・可視化・解析することができ、次のステップである温度ドリフト補正やセンサーフュージョンにスムーズに進むことができます。
次回は、このCSVデータを使って、Pythonでリアルタイムに可視化しながら**「温度変化とセンサー出力の関係性」を視覚的に分析する**環境を構築していきます。
回路図

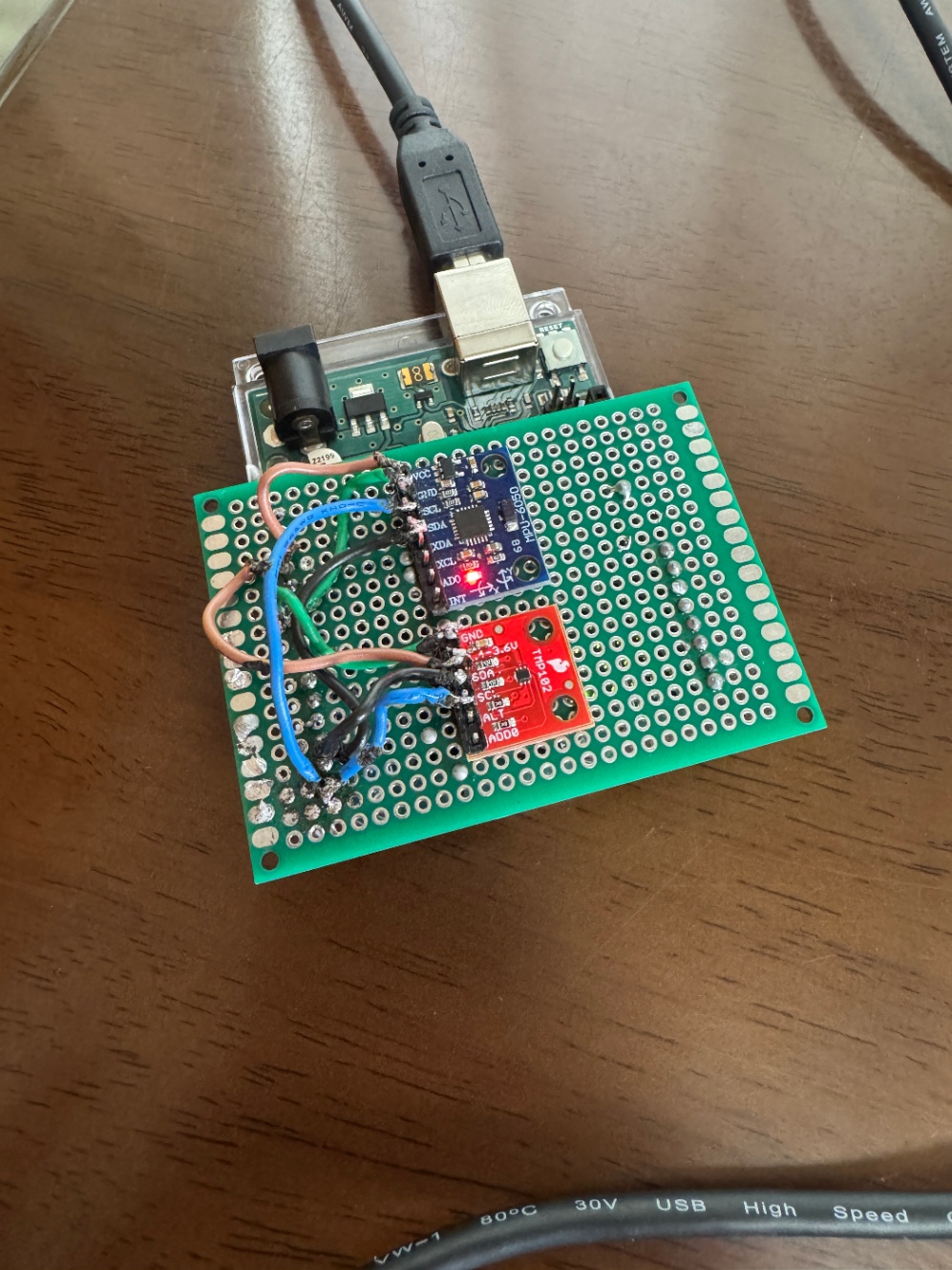
実際のモジュール(汚いけど、配線を作ってみた)

Arduinoコード(統合)
このスケッチでは、MPU6050から加速度・角速度の6軸データを、TMP102から温度データをそれぞれI²C経由で取得し、それらを1行のCSV形式でシリアルモニターに出力します。
sketch_accel_gyro_temp.ino
#include <Wire.h>
#define MPU_ADDR 0x68
#define TMP102_ADDR 0x48
const float ACCEL_SCALE = 16384.0; // ±2g
const float GYRO_SCALE = 131.0; // ±250°/s
void setup() {
Serial.begin(9600);
Wire.begin();
// MPU6050 スリープ解除
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x6B); // PWR_MGMT_1
Wire.write(0x00); // スリープ解除
Wire.endTransmission();
delay(100);
// CSVヘッダー出力
Serial.println("Temp_C,Accel_X[g],Accel_Y[g],Accel_Z[g],Gyro_X[dps],Gyro_Y[dps],Gyro_Z[dps]");
}
void loop() {
// TMP102から温度を取得
float tempC = readTMP102();
// MPU6050から加速度・ジャイロを取得
int16_t ax_raw, ay_raw, az_raw, gx_raw, gy_raw, gz_raw;
readMPU6050(ax_raw, ay_raw, az_raw, gx_raw, gy_raw, gz_raw);
// スケーリング
float ax = ax_raw / ACCEL_SCALE;
float ay = ay_raw / ACCEL_SCALE;
float az = az_raw / ACCEL_SCALE;
float gx = gx_raw / GYRO_SCALE;
float gy = gy_raw / GYRO_SCALE;
float gz = gz_raw / GYRO_SCALE;
// CSV出力
Serial.print(tempC, 2); Serial.print(",");
Serial.print(ax, 2); Serial.print(",");
Serial.print(ay, 2); Serial.print(",");
Serial.print(az, 2); Serial.print(",");
Serial.print(gx, 2); Serial.print(",");
Serial.print(gy, 2); Serial.print(",");
Serial.println(gz, 2);
delay(500);
}
float readTMP102() {
Wire.beginTransmission(TMP102_ADDR);
Wire.write(0x00); // 温度レジスタ
Wire.endTransmission();
Wire.requestFrom(TMP102_ADDR, 2);
if (Wire.available() == 2) {
uint8_t msb = Wire.read();
uint8_t lsb = Wire.read();
int16_t rawTemp = ((msb << 8) | lsb) >> 4;
if (rawTemp & 0x800) rawTemp |= 0xF000; // 負数補正
return rawTemp * 0.0625;
}
return -999.0; // エラー時
}
void readMPU6050(int16_t &ax, int16_t &ay, int16_t &az, int16_t &gx, int16_t &gy, int16_t &gz) {
Wire.beginTransmission(MPU_ADDR);
Wire.write(0x3B); // Accel_X_H
Wire.endTransmission(false);
Wire.requestFrom(MPU_ADDR, 14);
if (Wire.available() >= 14) {
ax = Wire.read() << 8 | Wire.read();
ay = Wire.read() << 8 | Wire.read();
az = Wire.read() << 8 | Wire.read();
Wire.read(); Wire.read(); // Temp(未使用)
gx = Wire.read() << 8 | Wire.read();
gy = Wire.read() << 8 | Wire.read();
gz = Wire.read() << 8 | Wire.read();
} else {
ax = ay = az = gx = gy = gz = 0;
}
}
結果
シリアルモニターにセンサーのデータが出力されていることを確認。

Discussion