Open16
ROSのデバッグ手法について学ぶ
<node name="orb_slam3_mono" pkg="orb_slam3_ros_wrapper" type="orb_slam3_ros_wrapper_mono" launch-prefix="xterm -e gdb --args" output="screen">
これでなにか動いたようだ
xterm Can't execvp gdb No such file or directory
インストールができていないだけだったので解決
sudo apt install gdb
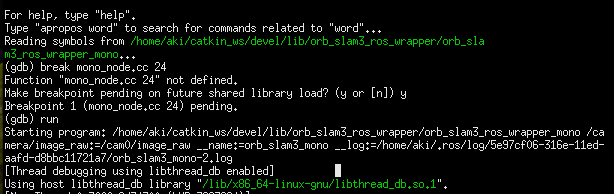
ブレークが貼れない
(gdb) break mono_node.cc 24
Function "mono_node.cc 24" "not defined."
Make breakpoint pending on future shared library load? (y or [n]) y
Breakpoint 1 (mono_node.cc 24) pending.

スレッドの切り替え