やったこと
Arduinoとgroveシールドで、groveのコンパスセンサを用いて磁場を計測できるか試してみた
参考
使ったもの
- Arduino UNO R3
https://akizukidenshi.com/catalog/g/g107385/ - Grove base shield
https://akizukidenshi.com/catalog/g/g116773/ - 三軸デジタルコンパスモジュール
https://www.switch-science.com/products/3932?srsltid=AfmBOoq1aiyBOjMK1sQa3aWuVHCEa4hH7bP9Oh5XiRUL3cwuDCc-ZMfp
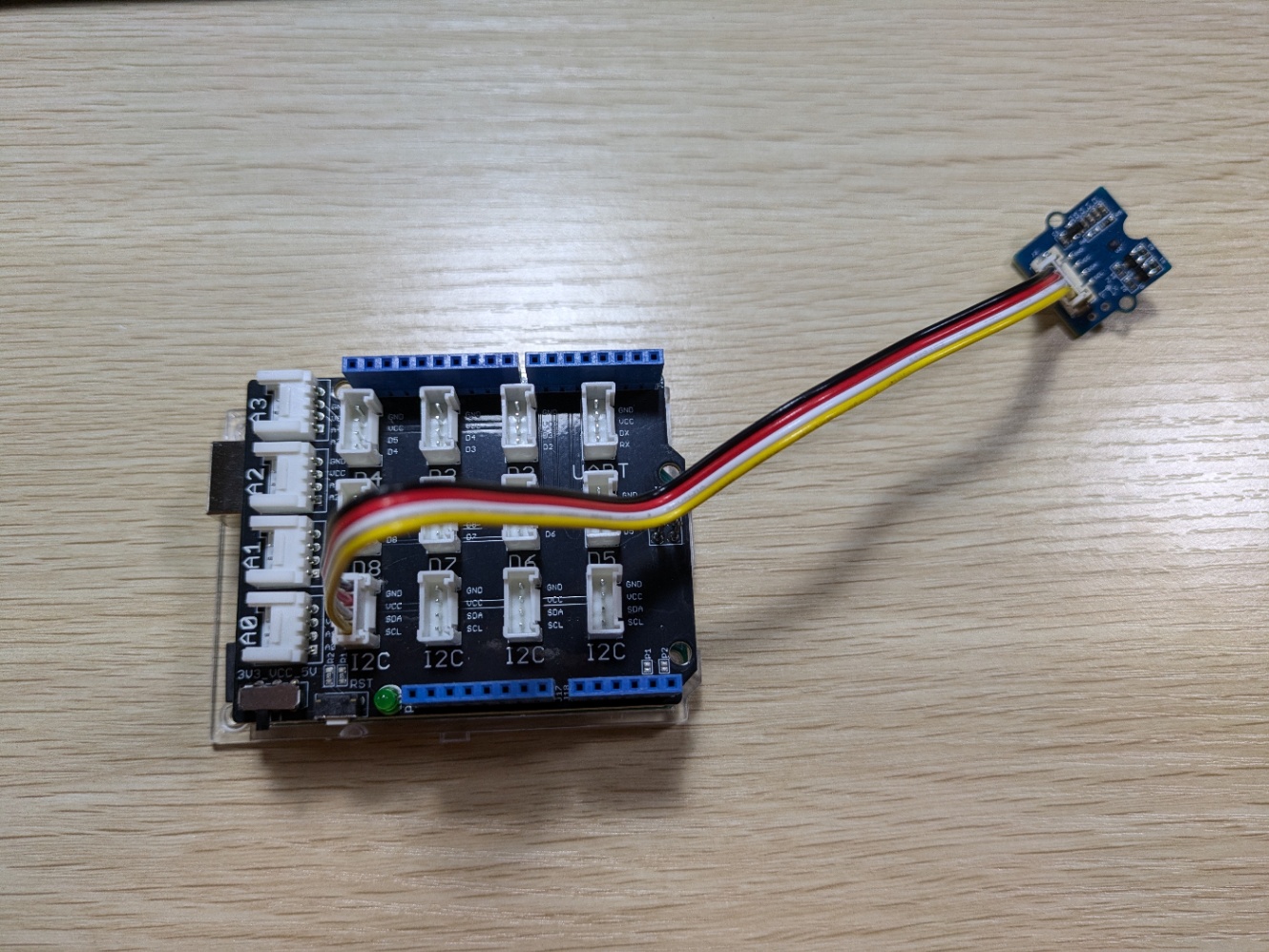
接続
コンパスに付属のGroveケーブルを適当なI2Cのコネクタにさす
動作確認
Arduino IDEで、ライブラリマネージャーを開き、「BMM150」を検索
「Grove 3Axis Compass V2.0 BMM150」を見つけてインストール

ファイル->スケッチ例->Grove 3Axis Compass V2.0 BMM150->BMM150_Example
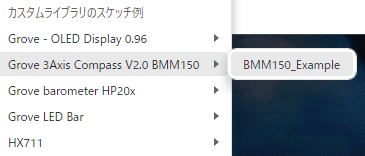
これを開いてコンパイルして書き込む
#include <Arduino.h>
#include <Wire.h>
// libraries
#include "bmm150.h"
#include "bmm150_defs.h"
BMM150 bmm = BMM150();
bmm150_mag_data value_offset;
void setup()
{
Serial.begin(9600);
if(bmm.initialize() == BMM150_E_ID_NOT_CONFORM) {
Serial.println("Chip ID can not read!");
while(1);
} else {
Serial.println("Initialize done!");
}
Serial.println("Start figure-8 calibration after 3 seconds.");
delay(3000);
calibrate(10000);
Serial.print("\n\rCalibrate done..");
}
/**
* @brief Do figure-8 calibration for a limited time to get offset values of x/y/z axis.
* @param timeout - seconds of calibration period.
*/
void calibrate(uint32_t timeout)
{
int16_t value_x_min = 0;
int16_t value_x_max = 0;
int16_t value_y_min = 0;
int16_t value_y_max = 0;
int16_t value_z_min = 0;
int16_t value_z_max = 0;
uint32_t timeStart = 0;
bmm.read_mag_data();
value_x_min = bmm.raw_mag_data.raw_datax;
value_x_max = bmm.raw_mag_data.raw_datax;
value_y_min = bmm.raw_mag_data.raw_datay;
value_y_max = bmm.raw_mag_data.raw_datay;
value_z_min = bmm.raw_mag_data.raw_dataz;
value_z_max = bmm.raw_mag_data.raw_dataz;
delay(100);
timeStart = millis();
while((millis() - timeStart) < timeout)
{
bmm.read_mag_data();
/* Update x-Axis max/min value */
if(value_x_min > bmm.raw_mag_data.raw_datax)
{
value_x_min = bmm.raw_mag_data.raw_datax;
// Serial.print("Update value_x_min: ");
// Serial.println(value_x_min);
}
else if(value_x_max < bmm.raw_mag_data.raw_datax)
{
value_x_max = bmm.raw_mag_data.raw_datax;
// Serial.print("update value_x_max: ");
// Serial.println(value_x_max);
}
/* Update y-Axis max/min value */
if(value_y_min > bmm.raw_mag_data.raw_datay)
{
value_y_min = bmm.raw_mag_data.raw_datay;
// Serial.print("Update value_y_min: ");
// Serial.println(value_y_min);
}
else if(value_y_max < bmm.raw_mag_data.raw_datay)
{
value_y_max = bmm.raw_mag_data.raw_datay;
// Serial.print("update value_y_max: ");
// Serial.println(value_y_max);
}
/* Update z-Axis max/min value */
if(value_z_min > bmm.raw_mag_data.raw_dataz)
{
value_z_min = bmm.raw_mag_data.raw_dataz;
// Serial.print("Update value_z_min: ");
// Serial.println(value_z_min);
}
else if(value_z_max < bmm.raw_mag_data.raw_dataz)
{
value_z_max = bmm.raw_mag_data.raw_dataz;
// Serial.print("update value_z_max: ");
// Serial.println(value_z_max);
}
Serial.print(".");
delay(100);
}
value_offset.x = value_x_min + (value_x_max - value_x_min)/2;
value_offset.y = value_y_min + (value_y_max - value_y_min)/2;
value_offset.z = value_z_min + (value_z_max - value_z_min)/2;
}
void loop()
{
bmm150_mag_data value;
bmm.read_mag_data();
value.x = bmm.raw_mag_data.raw_datax - value_offset.x;
value.y = bmm.raw_mag_data.raw_datay - value_offset.y;
value.z = bmm.raw_mag_data.raw_dataz - value_offset.z;
float xyHeading = atan2(value.x, value.y);
float zxHeading = atan2(value.z, value.x);
float heading = xyHeading;
if(heading < 0)
heading += 2*PI;
if(heading > 2*PI)
heading -= 2*PI;
float headingDegrees = heading * 180/M_PI;
float xyHeadingDegrees = xyHeading * 180 / M_PI;
float zxHeadingDegrees = zxHeading * 180 / M_PI;
Serial.print("Heading: ");
Serial.println(headingDegrees);
delay(100);
}
デフォルトのプログラムでは、起動して3秒後からキャリブレーションが10秒間行われる
キャリブレーションは8の字を描いて、xyzのそれぞれの最大値と最小値を計測し、平均値が0になるようにオフセットさせる
これをベースに色々といじれそう

Discussion