Open6
WSL2 + Docker環境でgundam_robotを動かす
環境
HW
- CPU: Intel Core i5-3570K
- RAM: 8GB
- GPU: Radeon RTX570
SW
- Microsoft Windows [Version 10.0.19044.1889]
- WSL2: version 5.10.102.1
WSL2はUbuntu 20.4を動かす - Docker for windows: version 4.11.1 (84025)
ROS環境のセットアップ
"tiryoh/ros-desktop-vnc:noetic"のDocker imageを使用する。
セットアップ方法は以下の移動
gudam_robotのインストール
GitHubのgundam_robotリポジトリからインストールを行う。
gundam_robotパッケージのインストール
$ sudo apt update
$ mkdir -p catkin_ws/src
$ cd catkin_ws
$ wstool init src
$ wstool merge -t src https://raw.githubusercontent.com/gundam-global-challenge/gundam_robot/master/.gundam.rosinstall
$ wstool update -t src
$ source /opt/ros/$ROS_DISTRO/setup.bash
$ rosdep install -y -r --from-paths src --ignore-src
$ catkin build
$ source devel/setup.bash
参考
rvizでガンダムを表示
$ roslaunch gundam_rx78_description display.launch
rivzが立ち上がりガンダムが表示される
真ん中のrivzの画面からスクロールをしてズームアウトすれば全体像が確認できる
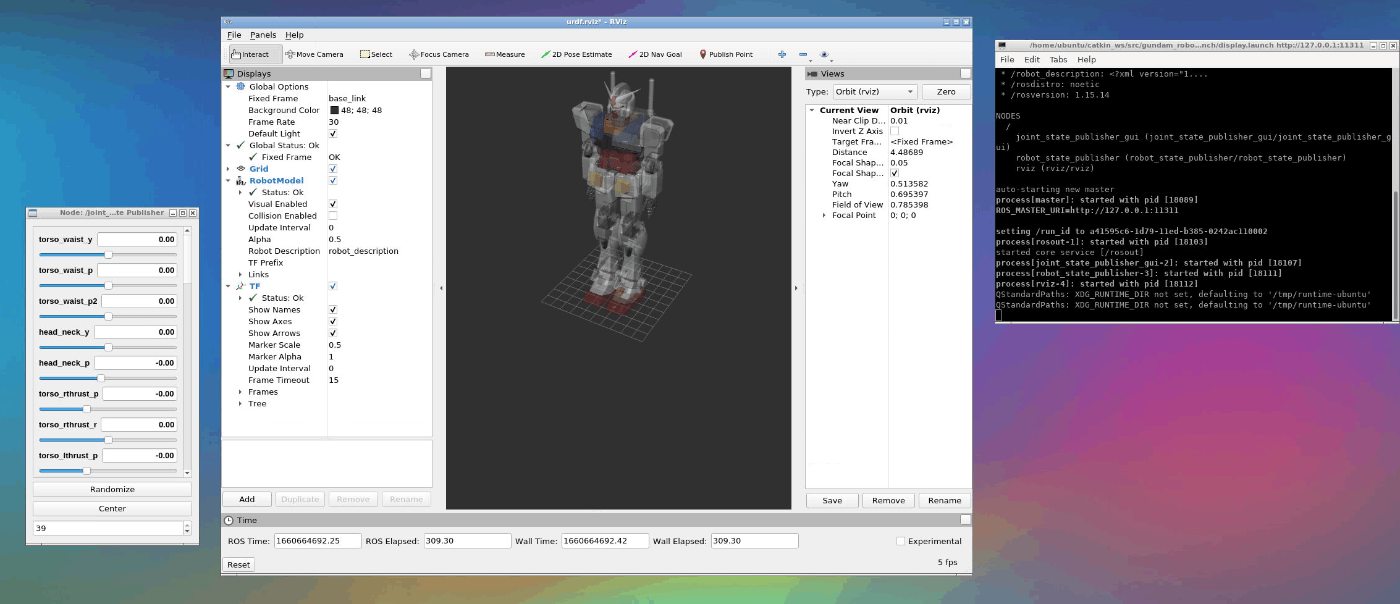
左側のjoint_state_publisherで各関節を操作できる
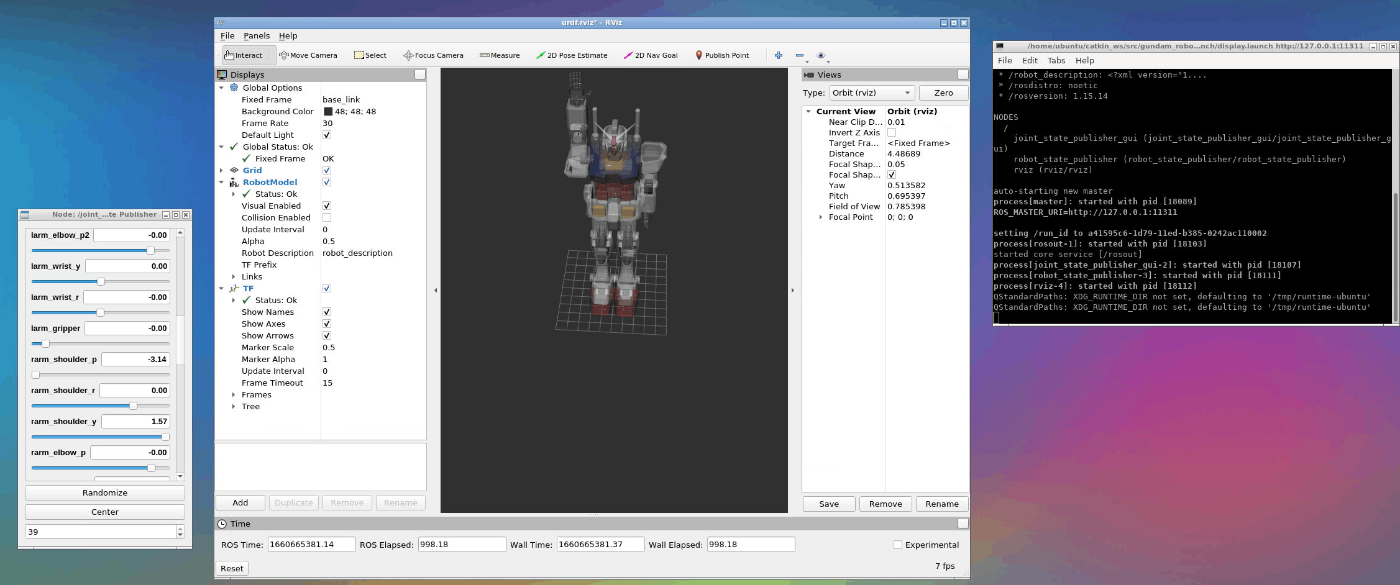
"Randomize"をクリックすると各関節の位置がランダムに決定する
こんな感じに変なポーズを取らせることができる(笑)
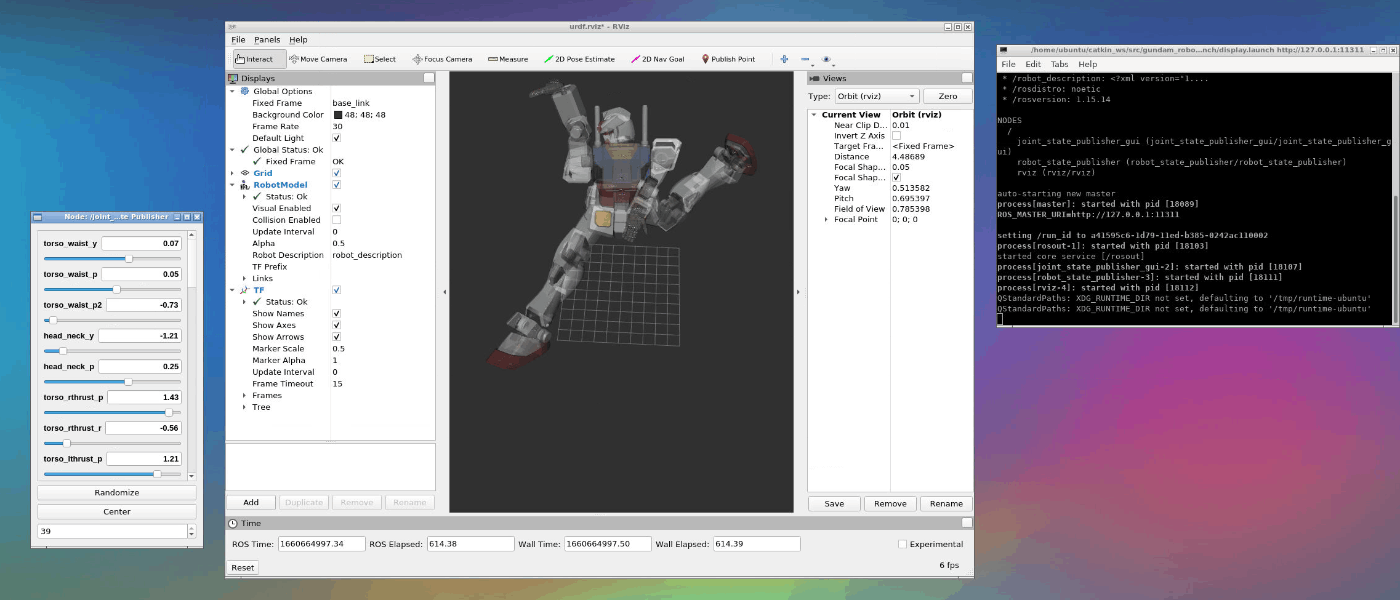
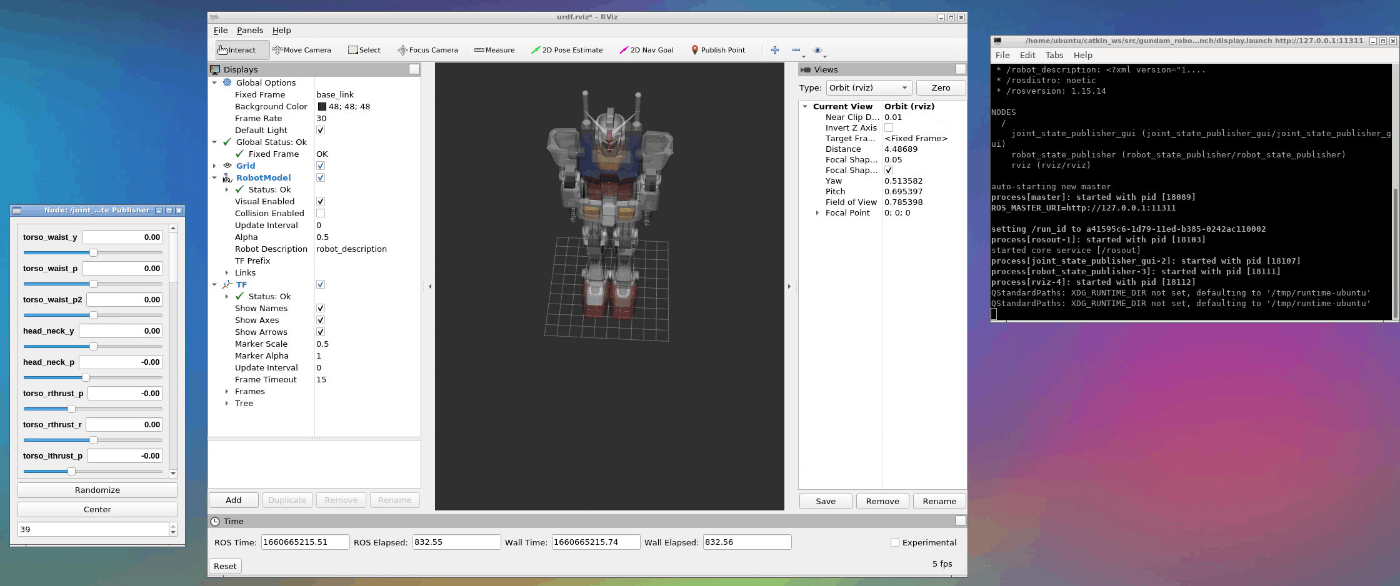
"Center"をクリックすれば初期状態の直立姿勢に戻る
参考
クレジット
©創通・サンライズ/ガンダム GLOBAL CHALLENGE
gazeboでシミュレーション
gazeboの起動
以下のコマンドを実行するするとシミュレーション環境のgazeboが起動する
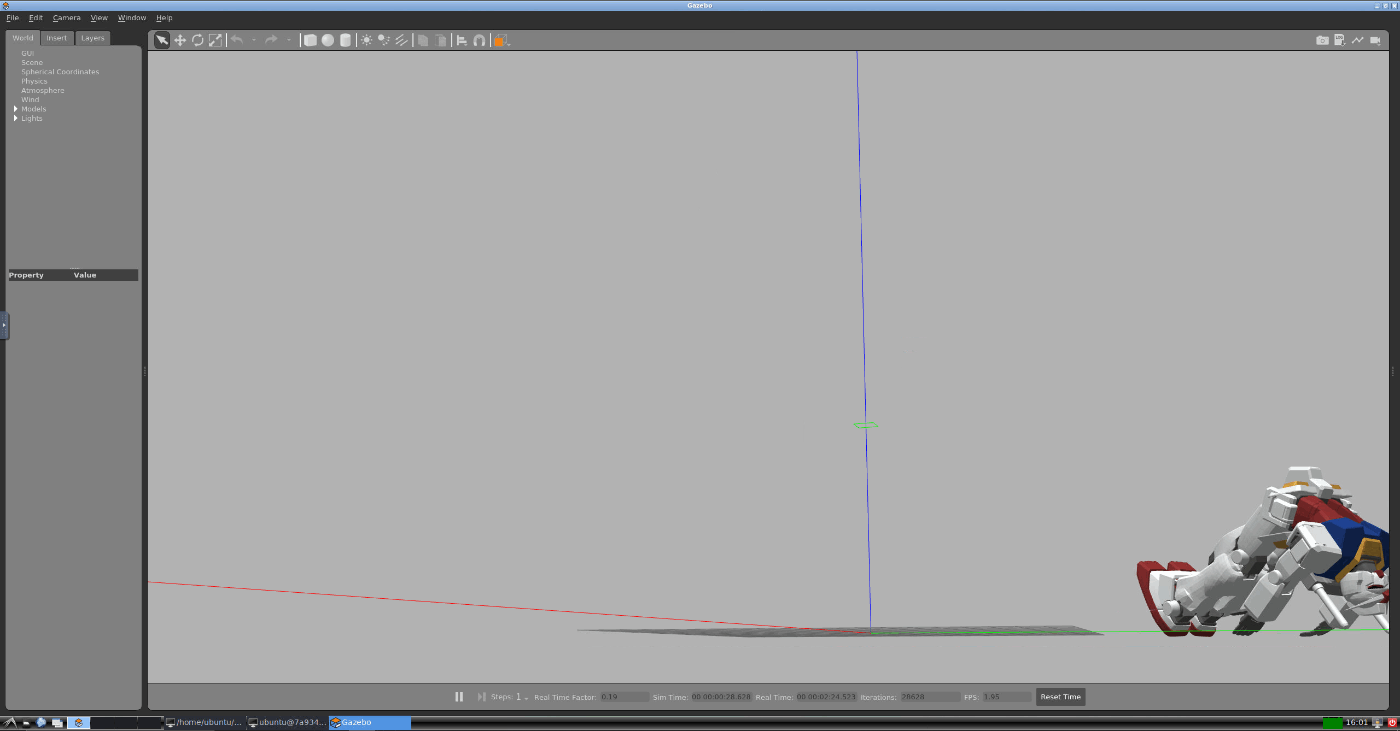
$ roslaunch gundam_rx78_gazebo gundam_rx78_world.launch
起動後ガンダムは倒れてしまう
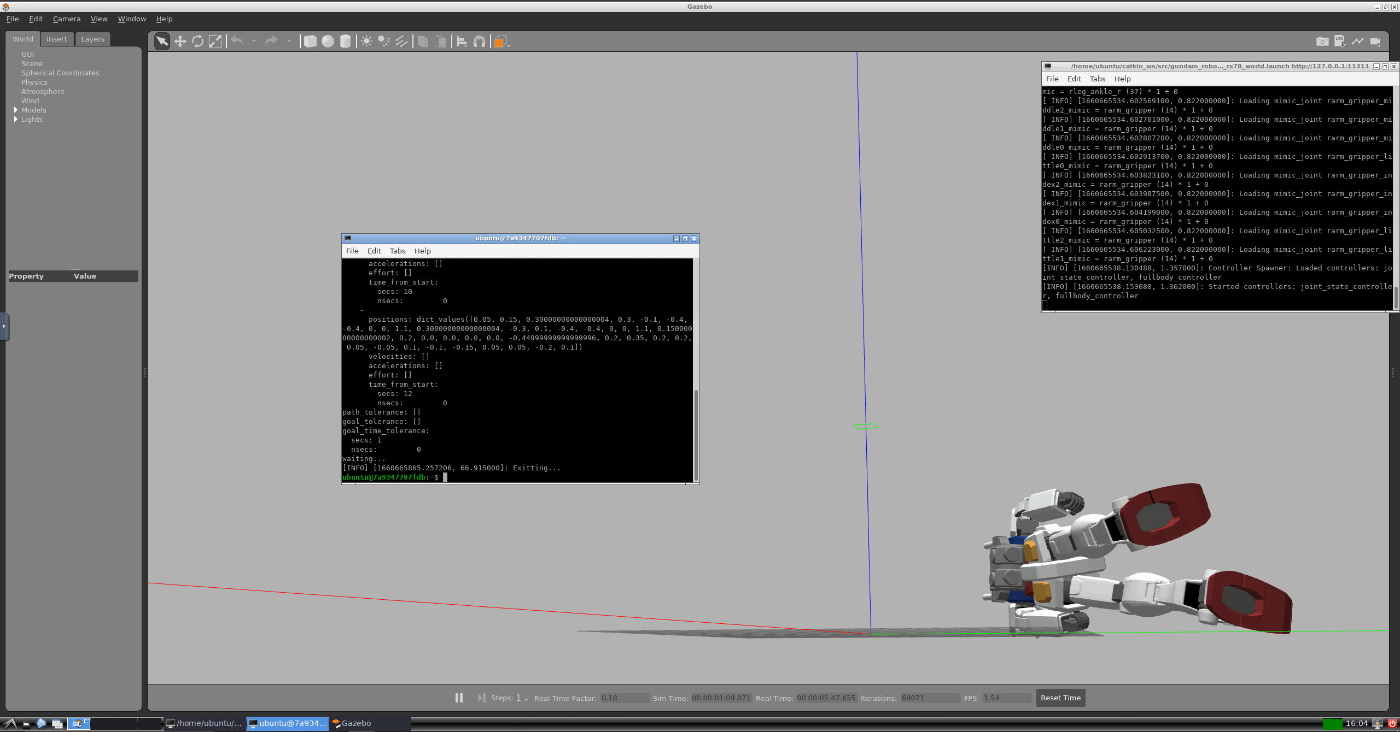
新しいターミナルを開いて以下のコマンドを実行する
# move upper body
$ rosrun gundam_rx78_control joint_trajectory_client_example.py
動いているようには見えるがガンダムは立てずに終了してしまう。
参考
クレジット
©創通・サンライズ/ガンダム GLOBAL CHALLENGE
最新版WSLでDockerを使用せず直接シミュレーションしてみた。
FPSは11~12程度は出るようになったが、ガンダム大地に立つことはできない
